ロボットに
COOLな動きを求めて
- 築地原 里樹
- TSUICHIHARA Satoki
- 工学部 助教 (ヒューマノイドロボティクス)
Profile
1988年大阪府生まれ。2018年、奈良先端科学技術大学院大学 情報科学研究科 博士後期課程 修了。2018年、東京理科大学理工学部 機械工学科ポストドクトラル研究員、2020年、福井大学工学部機械・システム工学科に助教として着任。
研究者詳細ページ
人の暮らしを助ける
今の社会、ロボットの技術はずいぶん発展している印象です。でも、ルンバのようなお掃除ロボットや工場のライン作業を担うなど、まだまだ特定の場所や作業に限定されているのが実情。私が目指すのは、人の暮らしに溶け込み、その助けになるロボットです。
そのためには様々な課題がありますが、例えばロボットの大きさ。私たちの生活環境にある机や食器棚、キッチンなど人間の大きさにマッチしています。ロボットの背丈も人と同じくらいがちょうどいいのではないでしょうか。私の研究室では、こうした生活空間におけるロボットの動作をめぐる課題に挑んでいます。
余ってる?自由度がカギ
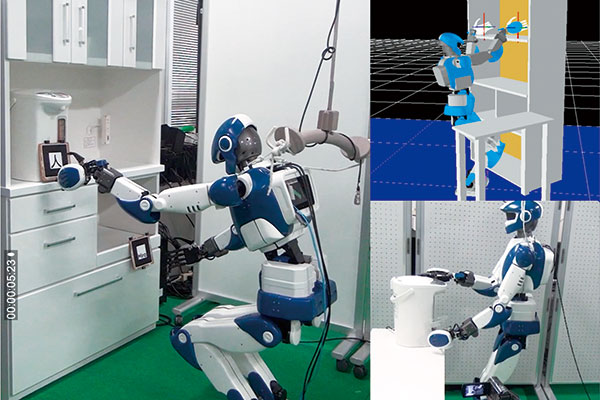
「食器棚のコップをとる」という動作は人にとっては単純作業です。人の場合、物体に接触する肩・腕・肘・手先、胴体や脚など多くの可動部があるので、余分なまでの自由度があって動作の滑らかさにつながっています。これを「冗長自由度」といいます。
ロボットに命令するには、動作ごとにどのような細かい動きが効いているか仮説をたて、その条件を突き止めるために機械学習を使い、巧みな動作を抽出する必要があります。冗長自由度も加わった膨大なデータを解析するのは大変なので、動作のコツとなる主要素を絞り、データを最適化することで効果的に特徴を抽出します。最近の実験では、「直立姿勢を維持し、転倒を膝で吸収することができるか」、「胴体を起こさないことで、動作を高速化できるか」を股の開きや胴体の傾きなどで検証しています。人型ロボットの課題となる作業中の転倒回避に貢献できると考えています。多様な動きから主要素を導きだすポイントが分かれば、計算量の減少につながり、安定した多彩な動きを実現できるようになるのではないかと考えています。
ガンダムもロボットなのに、アニメーターの神の手にかかり、動きがCOOLですよね。そんなロボットにこれからの暮らしを手伝ってもらいたいですね。

働き出してから、ペーパードリップでコーヒーを淹れるのに夢中です。是非コーヒーを飲みに来てください。